フィラメント振り子と測定の振動を研究する 物理学における研究室作品「数学的振動子の法則の研究」
数学的振り子の法則の研究
作業目的: 数学的振り子の法律を調べて、自由落下の加速を決定する
装置: 振り子(一時停止の電球)、線、ストップウォッチ、または2番目の矢印を持つクロック。
簡単な理論:
数学的振動子は発振器であり、これは、重大な非積極的な糸または重力の強さの均一な磁場での均一なロッドにある材料点からなる機械的システムである。
振り子Lの長さは、吊りの点からボールの重心までの距離と呼ばれます。
発振周期の実用的な計算のために、式が使用されます。
 ,
,
発振のT期間
t - 振動時の時間、
n - 完全振動の数。
振動の法則によると、振り子の周期は式によって決定することができます。
 ,
,
数学的振動子の振動の周期はバルク質量には依存しません。
p  数学的振動子の振動のリードオードは振り子の長さに正比例し、自由落下の加速度に反比例します。 この式はガイゲンの式と呼ばれます。
数学的振動子の振動のリードオードは振り子の長さに正比例し、自由落下の加速度に反比例します。 この式はガイゲンの式と呼ばれます。
歴史的な参考文献
クリスチャンgigens van Zyuliham (1629年4月14日、1695年7月8日)。 オランダの物理学者、数学者、メカニック、天文学者および発明者。 ハーグで生まれました。 彼はライデン大学で法科学に勉強しましたが、数学の授業を止めませんでした。 Galileeの研究に頼る、彼は力学の多くのタスクを解決しました。 1656年に、27歳で、彼らは最初の振り子クロックをトリガーで建設しました。 時刻を測定する時計を測定する時期の正確さを伴う時刻の身体実験と人間の実践活動の開発にはるかに届く影響がありました。 それ以前は、水の満了、燃焼トーチやキャンドルによって測定されたためです。 GUIGENSによって1673年までに、振動の理論は世界の性質を理解するための根拠の1つでした。
数学的変換による統合の式から、自由落下を加速するための式を得ます。

私たちの実験における数学的振り子の実モデルは、微細な弾性糸に吊り下げられた小さなボールを提供します。 ボールのサイズはスレッドの長さと比較して小さくなければなりません。 これにより、ボールの重心において、質量全体が一点に集中していると仮定することができる。
進捗:
アプライアンス部門の価格を決定します。
行...... ..m / deeds。
ストップウォッチ....... / DEED。
2.機器の誤差(機器の絶対誤差は分割価格の1/2です):
ルール Δ l = ...... ..m。
ストップウォッチ Δ t \u003d .......
振り子の最大長を設定してそれを測定する l 1 \u003d ... .m。
振り子(偏差角10-15 0)を走らせる t 振動数を計算します n (少なくとも7)。
振動数を変えることによって、経験をさらに3回繰り返すことによって。
t 2 \u003d ........................................... T 2 \u003d .........
t 3 \u003d ....................................... T 3 \u003d .........
t 4 \u003d ............................................... t 4 \u003d .........
振り子の長さを変えます l 2 \u003d ... .mとすべての測定値を繰り返します。
テーブルに入れるデータ。
№ 測定
振り子の長さ、
l、M.
№ 経験
振動時間
t、S。
振動数
n
振動期間
T、S。
期間の平均値T CF、
フリーフォール、G、M / S 2の加速度。
平均値
フリーフォール、G WED、M / S 2の加速。
l wed \u003d。
t WED \u003d。
相対:絶対値:
![]() ,
,
質問の質問:
2秒の期間の数学的振り子は何ですか?
250N / mの剛性があるばね上にある多くの貨物を見つける.16秒間20の振動を作ります。
月の自由落下の加速は1.7 m / s 2.月の数学的プレーヤーの振動の期間となるでしょう。 貨物の質量からの答えは依存しますか?
振動体の座標は、法則x \u003d 0.5sin45πtによって異なる。振動の振幅と周期に等しい?
点12cm、線周波数は14 Hzの出力の不倍振動の振幅は、発振の初期位相は0です。点x \u003d x(t)の動き方程式を書き込みます。
価格分割規模
値の違い(符号を除く) 物理量分割を制限するスケールのマークに対応しています。 デジタル機器では、スケールを分割する価格を置き換える特性は、識別ステップを果たします。
a)スケールで2つの最も近いデジタル化されたタッチを選択します。
c)値の違い(より減算するから) 選択したストロークについては部門の数に分けられます。
n  そして、このパターンが大規模に温度計のスケールを示しています。 当社は、部門の価格を計算するための規則を支援することを説明します。
そして、このパターンが大規模に温度計のスケールを示しています。 当社は、部門の価格を計算するための規則を支援することを説明します。
a)デジタル化されたストロークを選択してください20℃と40°C
b)それらの間の10分割(間隔)
c)計算:( 40℃ - 20°C):10分割\u003d 2℃/ケース。
回答:部門の価格\u003d 2°C / Word、
スケールのデジタル機器は明示的には利用できません。また、分割価格ではなく、低コスト数の価格は機器の読み書きに記載されています。
p 
ライター:
1)この装置の規模の分割は1(条件付き単位)/ケースです。
2
この機器の規模の分割は、0.01(従来の単位)/ケースである。
3
)この機器の規模の分割は0.1(条件付き単位)/ケースです。
4)この機器の規模の分割は0.001(条件付き単位)/ケースです。

私。 仕事の目的
機器に実装されている数学的振動子の振動運動に関する観察、その機能図は図1に示されています。
長さと振幅の異なる振動子振動周期の測定
数学的振り子の等時性振動のモードを決定する
示された測定結果に対するボールの自由落下の加速度を計算する。
ii。 。 理論的部分
一定の長さの重量のない非格納式スレッドを使用して、サスペンションの固定点に取り付けられた小型ボールからなるデバイスを検討します(図1)。
ボールのサイズが長さよりはるかに少ない場合l スレッドからボールを\u200b\u200b見ることができます 質点; そしてボールの質量が糸の質量以上であるならば、後者は無重力と見なすことができます。 ねじは、ボールの重力が糸の無限に小さな延長を引き起こすという条件で、解読不可と見なすこともできる。
この機器は、いわゆる数学的振り子の振動運動をシミュレートすることを可能にします。
図。 数学的振動子の振動を研究するための装置:1。振り子の偏差を確立するための金属板。 モバイルプラットフォーム。 測定ライン。

数学的振り子の振動運動のイラスト。
実際、初期状態では、スレッドは垂直方向に向けられます(図2の位置1)。 この場合、電力f スレッドテンションと電力mg。 ボールの重大度は糸の方向と一致しているが反対方向に向けられている。 うねりの糸であるので、両方の力が互いにバランスをとる、すなわちf \u003d mg。 。 ボールは一人です。 この振り子のこの状態は、その平衡位置と呼ばれます。
角度でボールを除去し、角度でボールを除去している平衡位置から振り子を引き抜きます。φ 0 (図2)。 それからプッシュなしで行かせてください。 重力の作用の下でmg。 ボールは平衡の位置に向かって移動し始め、その後、平衡位置の反対側にはそれから小さい角度までずれるであろう。φ 0 そして重力の作用の下で、再び平衡の位置に向かって急いだ。 ボールに外部の影響がない場合、後者は同じ平面内で説明された動きを実行します。 明らかに、ボールの動きの軌跡は半径の円の円弧になりますl 。 そのような動きは振動と呼ばれます。
ボールに対する抵抗の作用のために、彼の振動は、それがそれがそれから逸脱していない角からそれが角に逸脱することがそれがそれから逸脱することがそれがそれから逸脱することをそれが役立つという証拠を減衰させるであろう。 しかしながら、このプロセスがかなり短時間で観察される場合、振動プロセスは不運に認識され得る。
任意の時点でボールに作用する力を考えてみましょう。t。 φを取得します。 - 現時点での糸の偏差の角度。 次の方程式を次のように書いています。τ 彼が時価にあるボールの軌跡のポイントに費やされた接線と一致するt。
mAτ\u003d - MgSinφ(1)
ここでτ。 - 接線加速、m - ボールマス。 マイナスサインオン(1)は、平衡位置から重力の強さを移動するときにこの動きを防ぐことができるという事実を考慮に入れる。
ボールは角からの2回目のデリバティブとして定義される角加速度εφ、すなわち
. (2)
接線方向の加速の間τ。 そして角度εは明らかな接続を持っています
(3)
式(1)式(2)および(3)を考慮すると、次の形式があります。
. (4)
式(4)未知の機能φ(t) それは2次派生記号の価値があります。 数学におけるそのような方程式は、通常の2次微分方程式と呼ばれます。
小さな角度でそれを考えると、簡素化することができますφ, ラジアンで測定されます。 それから(4)の代わりに私たちは持っています
. (5)
式(5)は振り子の動きを説明している。 それは高調波発振器の方程式とも呼ばれます。
即時代用は、式(5)の解の形式があることを確認することができる。
, (6)
貫通表記の場合
. (7)
したがって、コーナーが変化することがわかりますφ 時間までに、正弦波法があります。 値φ 0 , 平衡位置からの最大偏差角度と等しいは、高調波振動の振幅と呼ばれます。 この場合の振幅の量は初期偏差によって異なります。 符号の下にある洞の大きさは位相と呼ばれます。 位相は比例して成長します。 副鼻腔の符号の下の値を初期フェーズと呼び、それは招かれた動きではゼロです。
振動運動の性質を決定するサインの関数、周期的関数の本質は等しい期間の値からの本質です。 後者はスルーする場合を意味しますt 振り子振動の周期を表し、次に位相値について次の等式を書くことができます
, (8)
ここで、循環周波数。
今度は(7)を考慮に入れるt私たちは持っています:
(9)
比率(9)は、式(4)の線形化が式(5)の線形化がLEDであることを示し、その解は独立性を可能にする。振幅φ0からのT。
そのような振動はアイソクロンと呼ばれます。
式(9)は依然として提出することができます。
k L、(10)
それを通して〜する
(11)
線形関数依存関数関数の角度係数をマークした引数LからT 2
したがって、振り子の振動のアイソクロN主義は、その期間の測定値の関係(10)の正義によってチェックされる。t 異なる値でl 同じコーナーに修正されましたφ 0 .
実験的な点に従って構築された機能的依存は、角度係数を決定することを可能にします甲体 加速度の数値を通してg ボールの自由落下は次のように計算されます。
. (12)
また、単位寸法についてTとLの加速度G この比率から計算できます。
(13)
i 。 実験の順序
等時性振動を記述する式(5)をもたらした式(4)の線形化は、仮定に基づいているので、アイソクロニズムの範囲が角度値によって決定されることは明らかである。φ 0 線形依存がある。
したがって、値の範囲を決定するためにφ 0 関係(10)がいくつかの値に有効であるかφ 0 指定された機能依存関係から依存関係をさらに構築して角度係数を計算する測定を行うk そして選択された角度のためにφ 0 値を計算しますg ソフトウェア(12)、およびそれらを一般に承認された値と比較するg \u003d 9.8m / s 2。 それらの角度φ0 計算値のためにg 測定誤差を考慮して、同じ数値が保存され、このデバイスによって実装されている振動絶縁の範囲を決定します。
測定手順は以下の通りである。特定の角度値が選択されている。φ 0 平衡位置からボールを\u200b\u200b排除する必要があるため、振り子の長さが設定され、その間に期間が測定される。t 。 固定コーナーで経験が数回行われますφ 0 3つから5つの測定値を持たなければなりませんlとtの
それは平面上の測定の最初の一連の測定値です(T 2、L )ある点のみを許可します。 この石炭で式(10)を確認するφ 0 いくつかのそのようなシリーズを製造する必要があります。
それぞれの角について5回のそのような一連の測定を行うことが提案されている。φ 0 これは次の3つの角を選ばれます。φ0\u003d 10 O。 φ0\u003d 20°。 φ0\u003d 30°。
繰り返し測定値についてlとtの 選択された角度についてφ 0 それらの平均算術は式によって計算されます。
, (14)
ここで - 測定数
測定値の測定の結果として、生徒は経験豊富なデータを含む次の3つのテーブルを記入し、それらを先生に示す必要があります。
表1。
|
φ0\u003d 10 o. |
||||||||||
|
測定数 |
シリーズ1。 |
シリーズ2。 |
シリーズ3。 |
シリーズ4。 |
シリーズ5。 |
|||||
表2。
|
φ0\u003d 20° |
||||||||||
|
測定数 |
シリーズ1。 |
シリーズ2。 |
シリーズ3。 |
シリーズ4。 |
シリーズ5。 |
|||||
表3。
|
φ0\u003d 30° |
||||||||||
|
測定数 |
シリーズ1。 |
シリーズ2。 |
シリーズ3。 |
シリーズ4。 |
シリーズ5。 |
|||||
長さを測定するときl 振り子は、後者がボールを保持し、ボールの半径の長さとボールの半径で構成されていることに留意されたい。
ボールの半径はその直径を通して計算され、それはキャリパーによって測定される。 ボールは完全な球面表面を表していないので、各直径測定は前回測定とはわずかに異なる値を与える。
振り子の振動運動を実装する機器では、スレッドの長さを調整するデバイスがあります。 この場合、糸の長さは2つの方法で測定することができます。リファレンススレッドを適用するためのフィラメントスレッドのいずれかに、その長さは測定ライン上で測定されなければなりません。 基準糸としては、ある長さのスレッドを取り、この装置の調整可能な装置を使用して、振り子のフィラメントの長さを固定します。
モバイルプラットフォーム(図1参照)は、別の方法で振り子の長さを測定することができます。 これを行うには、ボールと共に振り子のスレッドが必要です(図3参照)(図3参照)は、プラットフォームの同じ位置を測定ラインに固定することができます - 長さになりますボール半径を差し引かれなければならないボールと共にねじ山の。 ボールの直径はカレイパーで測定する必要があります。

図。 3。
t 振動子振動は判断するのが良いです。t 振り子のいくつかの振動を加えて、次にこの時間を振動の数に分けます。 1つの発振時には、極端な位置の1つからのボールが同じ位置に戻る時間があることに留意されたい。
目的の角度を確立するためにφ 0 この点から発せられる垂直線に対して異なる角度の下で異なる角度の下で曲がった複数のガイドラインがある長方形の金属板を使用することが必要である。 これらの角度は輸送を用いて測定することができる。
可動プラットフォームは、ボールが下方位置にあるときにプレート上の垂直線が振り子ねじと一致するように、矩形板が振り子ねじ山吊り点を組み合わせることを可能にする。
指定された整列後、移動プラットフォームはプレートと一緒に固定することができます。 さて、糸の偏差を1つまたは他の角度で逸脱することで、それは特定の角度を定義するプレートのプレートのうちの1つと組み合わされなければならない(図1参照)。
iv。 。 測定結果の処理
測定値のいずれかの値lとtの テーブル1~3に示されているのは、特定のエラーで測定されるので、正確な値ではない。
そのような場合、式(14)によって計算されたそれらの平均演算は、これらの量の正確な値として受け入れられている。 その後、測定誤差の下で、平均算術から測定されたすべての値の最大偏差のモジュールを意味します。 すなわち、誤差Δ1 振り子の長さの測定は次のように決定されます
δ1\u003d max | l i - l wed |(15)
そして誤差Δ2 - 振り子の振動の周期を計算する必要があります。
Δ2\u003d max | T i - T wed | 。 (16)
式(15) - (16)索引私。 \u003d 1,2,3 ...対応する値のすべての測定数を実行します。
プログラム内のコンピュータで測定結果を生み出しますマイクロソフトエクセル。 そして、私たちは特定の測定結果に関する必要な計算の技術を実証します。
テーブル3を以下の実際のデータで充填する。
表3。
|
φ0\u003d 30° |
||||||||||
|
測定数 |
シリーズ1。 |
シリーズ2。 |
シリーズ3。 |
シリーズ4。 |
シリーズ5。 |
|||||
|
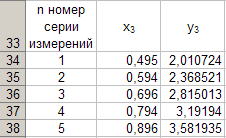
0,505 0,495 0,503 0,498 0,500 |
1,434 1,434 1,428 1,422 1,418 |
0,606 0,594 0,603 0,597 0,600 |
1,547 1,553 1,557 1,575 1,553 |
0,704 0,696 0,702 0,698 0,700 |
1,685 1,681 1,678 1,691 1,687 |
0,806 0,794 0,804 0,797 0,800 |
1,807 1,815 1,791 1,791 1,800 |
0,904 0,896 0,903 0,898 0,900 |
1,907 1,909 1,925 1,906 1,897 |
|
測定シリーズごとに、計算する式(14)に従って必要です。l cfとt cf そして中毒を構築しますT CP 2 \u003d F(L CF) 。 便宜上、表記を導入します。T CP 2 \u003d Y 1、L CF \u003d X 1。
指定された計算に移動する前に、プログラムに構築しますエクセル 表4と表4のフォーマットの準備、そのデータは機能的依存関係を構築するときに使用されますy 1 \u003d f(×1)。
エクセルで 表3は以下のように形成される。
シート1の作業帳でエクセル 細胞セルの範囲を活性化しますA 1:A 2、それらを組み合わせると、最初の列のヘッダーからキーボードから得られる統合セルに入れます。n 測定数「、セルの範囲を有効にしますB 1:C. 1、それらを組み合わせると、2番目と3番目の列の共通のヘッダーをキーボードから結果として生じる複合セルに移動します。シリーズ1。 「、セルを有効にしますb 2およびテーブル3の2列目の字幕をキーボードから持ち込みます。l 「その後、C2セルを作動させ、テーブル3の3列目の字幕をキーボードから持ち込みます。t "" 表3の残りの列に対して指定されたアクションを繰り返します。上記の操作を実装した結果として、表3のフォーマットを取得します。
その結果、表3の結果として得られたフォーマットデータを入力して、プログラムの表3を取得します。エクセル。

プログラム内の表4フォーマットを構築するエクセル シート1の作業帳でエクセル セルを起動しますA. 9そしてキーボードから最初の列のヘッダーを入力してください。n B. 9そしてその中に2番目の列ヘッダーを入力します。l cf \u003d x 1 "" 同様に、3番目の列、4番目の列のキーボードヘッダーに入りました。セルC 1、D 1およびEにおけるT CF "、" T cp 2 \u003d y 1 "および" Y 1 / x 1 " それぞれ1。 次に、セルを有効にしますA. 10、セル内のキーボード番号1からそれを取り入れたA. 11図2、セルの範囲を有効にしますA 10:A そして、セルにオートフィルを実行しますA. 以上の処理の実行の結果、表4を取得する。
表4。
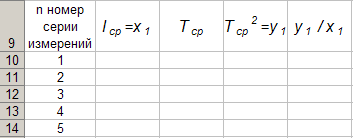
表4の第1行の充填技術は、シリーズ1の処理の処理について説明する。
(14)の最初の式をプログラムするために、私たちは取得しますl cf. そして、表4に入ります。b 10およびキーボードの式「\u003d合計(B3:B7)*(1/5)」を入力してください。
次に、(14)の2番目の式をプログラムします。e. 2およびキーボードの式「\u003d合計(C3:C7)*(1/5)」を入力します。
私たちはt cfを得ます。 そして私達は正方形に建てられ、その後私達は態度を計算します。 これを行うには、セルを有効にしますd 10およびキーボード式「\u003d C10 ^ 2」を入力してから、セルを有効にします。e. 10およびキーボード式「\u003d D10 / B10」に入力してください。 これらすべての行動の後、表4の最初の行が取ります

他のシリーズのこれらの計算を繰り返した後、表4は最終的な外観を取ります。
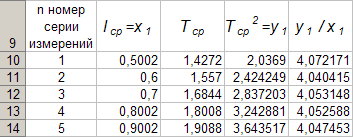
表4プログラムを使用することを許可しますエクセル 機能依存のグラフを作成しますy 1 \u003d f(×1)。
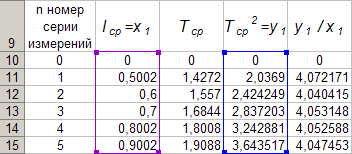
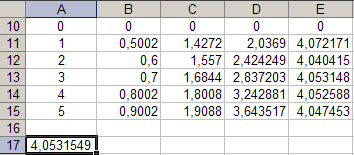
これを行うには、セルの範囲を有効にしますD 10:D. 14、プログラム機能のプログラムを呼び出しますエクセル まず、「点」チャートの種類、最初の形式を選択します。 次のボタンの上にマウスをまとめ、左マウスの左キー(LKM)を実行します。 その後、行タブに行きましょう。 これを行うには、「マスターチャート」ウィンドウの上部にある「行」タブのマウスをまとめ、LKMの単一のプレスを実行します。 次に、カーソルをフィールド "X"に取り付けます。その後、マウスのカーソルをセルにまとめます。b 10、LKMを押して解放しないとマウスカーソルをセルに移動します。b その後、LKMを手放す。 その結果、式「\u003d LIST1!$!$は、「値x」に記録されます。B $ 10:$ B. 14ドル。 それでは、マウスボタンを「次へ」ボタンにまとめて、LKMを2回押して、その後、「終了」ボタンのマウスカーソルを移動し、LXの単一のプレスを実行します。 シート1の作業帳でエクセル 機能依存のグラフが表示されます。y 1 \u003d f(×1) 。 文字列10をアクティブにして新しい行を追加し、その後キーボードからセルに移動します。A 10:E 10桁の「0」 次に、グラフの任意の点にマウスカーソルをまとめ、LKMの単一のプレスを実行します。 スケジュールのデータの範囲を実行して、マウスカーソルを値の範囲の境界に合計します。y 1。 そして、境界の右上隅にあるマーカーをセルに移動するd 同様に、範囲で進みます×1。
これで、マウスカーソルをグラフの任意の点にまとめ、マウスの右ボタン(PCM)を押すと実行します。 表示されるコンテキストメニューで、マウスカーソルを「トレンドラインの追加」コマンドに要約し、LKMの単一のプレスを実行します。 図4は、指定された構造の結果を示しています。
図4
図4その中毒に従うy 1 \u003d f(×1) 線形の線形であり、式によって説明されています
y 1 \u003d 4.04 8 x 1 + 0.00 24(17)
式17は角係数を示すk 式(10)から等しくなることが判明します。k \u003d 4,0493。 この値の場合k 式(12)に代わる、我々はスピードフリーフォールの範囲を得るでしょう。
コーナー係数k 式(10)では、式によってデータテーブル4から計算できます。
(18)
これを行うには、セルを有効にしますA. 17、キーボードからそれを伝言 "\u003d合計(E 11:E 15)*(1/5)」
kを手に入れる。 \u003d 4,053、すなわち に近い数k 図4に示すグラフから入手した。
明らかに、値を用いて式(12)で得られた数k 式(17)からいくつかの誤差があります。
このエラーを表3と4に戻すには、このエラーを表します。
最初はプログラムにありますエクセル 新しいテーブルフォーマットを作成する5.作業帳のシート1の中エクセル セルを起動しますA. 19と最初の列のヘッダーをそれに持ってきてください。n 測定シリーズ番号、セルを有効にしますb 19列目のヘッドラインのキーボードからそれを取り入れて: "δ1 PO(15)」 同様に、3番目の列ヘッダーヘッダーがキーボードから持ち込まれます。セルCに2インチ(16) " 19.次に、セルを起動しますA. 20台のキーボード番号1から、セルの中でそれを取り入れましたA. 21桁2、セルの範囲を有効にしますA 20:A 21とセルにオートフィルを実行しますA. 以上の実施の結果、表5を得る。
表5。

プログラミング式(15)と(16)が必要l iとt i 、各シリーズの測定値は表3から取るl cfとt cf データテーブル4から。
δを計算する。1 測定の一連の測定のためには、セルを活性化する必要があります。m 3およびキーボードからそれを入れて、「\u003d abs(b3-b $ 11)」の後、セルにオートフィルを実行するm 7.これでセルにありますb 20鍵盤から式「\u003d MAX(M3:M7)」を表示します。
δを計算する。2 同じシリーズによると、セルを起動する必要があります。n 3およびキーボードからそれを入れて、式「\u003d ABS(C3-C $ 11)」の後、セルにオートフィルを実行します。n 7.これでセルにありますC. 20キーボードから式 "\u003d max(n3:n7)を持ちます。
その結果、表5に進みます

これらの一連の測定値のソフトウェア(15)および(16)の計算を実行した後、表5
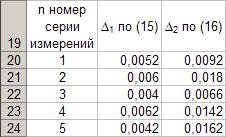
表5のデータから、各測定シリーズ、長さの正確な長さが明らかです。l 振り子と期間t 振り子振動が決定される
l \u003d L cp±δ1、t \u003d t cp±δ2(19)
それはδであることがわかります1とΔ2 振り子長のそれぞれに対して異なります。 数式(19)から、図4の直線が誤差で行われ、いわゆる実験データの変動がその周辺領域で行われることになる。
経験豊富なデータの散布を考慮に入れるために、もう1つの機能依存関係を計算します。
(T CF +Δ2)2 \u003d F(L CF +Δ1)、(20)
(T CF - Δ2)2 \u003d f(L CF - Δ1)。 (21)
依存関係を計算する(20)、新しい指定を紹介します。
x 2 \u003d(L CP +Δ1)、(22)
y 2 \u003d(T CF +Δ2)2、(23)
式(22)と(23)を使用して計算を進める前に、プログラムを使用して新しい表6のフォーマットを形成します。エクセル 、以前に示されたアルゴリズムによると、それから私達は得る
表6。
x 2とy 2を計算するとき (22)および(23)によると、テーブル4および5のデータを使用する必要がある。最初は計算しますx 2 そして得られた番号は表6に入る。
これを行うには、セルを有効にしますb 27、キーボードからそれを式「\u003d B11 + B20」から持ち込まれた。
その後、Y 2を計算します これを行うには、セルを有効にしますC. 27、キーボードからそれを式「\u003d(C11 + C20)^ 2」からそれを取り入れた。
B 27:C. 27とセルにオートフィルを実行しますC 31。
その後、表6に次のデータが埋められます。
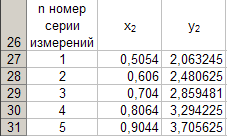
表6によれば、依存関係のチャートを構築しますy 2 \u003d Y 2(×2) 前述の技術によると(図5参照)
図5は、中毒を示していますy 2 \u003d Y 2(×2) 式によって決定されます
y 2 \u003d 4.08 86 x 2 - 0.002 3(24)
機能依存関係の計算に進みます(21)。 これを行うには、2つの補助式を紹介します
x 3 \u003d L Cp - Δ1、(25)
y 3 \u003d(T CP - Δ2)2。 (26)
これらの式の計算は表4と表5に従って行われ、これらの計算結果を表7に記録します。まず、計算x 3。 。 これを行うには、セルを有効にしますb 34およびキーボードから式「\u003d B11-B20」からそれを取り入れた。
それからY 3を計算します これを行うには、セルを有効にしますC. 34およびキーボードからそれを式 "\u003d(C11-C20)^ 2"からそれを取り入れた。
細胞の範囲を有効にしますB 34:C. 34とセルへのオートフィルを実行しますC 38。
このテーブルデータは次のとおりです。
機能依存y。 3 = y。3 (バツ。3 ) 表7に従って構築されているが図6に示されている。
図6からそれに続く
y。3 = 4,00 7 3 バツ。3 + 0,00 71 (27)
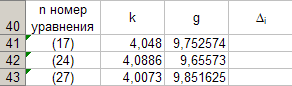
角度係数の値k 式(17)、(24)、(27)によると、表8に入る。

プログラミング式(12)および計算するg各値に対応してくださいk。 値を紹介しますg 表8.これを行うには、セルをアクティブにしますC.41およびキーボードからそれを通して、式「\u003d(4 * pi()^ 2)/ b41」から持ち込まれます。 その後、セルにオートコッパを実行しますC.43.
今度は平均値を計算しますg 式によると
これを行うには、セルを有効にしますC.45、キーボードからそれを鍵盤から持ち込まれた「\u003d(1/3)*合計(C41:C43)」。

正確な値で受け入れられている9.75331になることがわかります。 この値を決定するというエラーg 式で計算します
Δ 3 = max | g私。 gcF| = max | Δ 私。| (28)
これを行うには、セルを有効にしますd41およびキーボードからそれを取り入れて、式「\u003d ABS(C41-C $ 45)」。 その後、セルにオートコッパを実行しますD43。.

計算するΔ 私。 表8に入ります。これを行うには、セルを有効にします。d45およびキーボード式「\u003d MAX(D41:D43)」からそれを取り入れた。
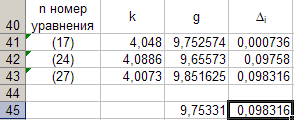
表8からのデータからそれに続くΔ 3 \u003d 0.098316。 したがって、加速度g 間接的な測定値の結果として、この装置で得られたフリードロップは等しくなりました
g \u003d 9,7533±0.0983。
質問
- デバイスが数学的振り子の振動を研究するためのどのような要素です。
- どの法形法の法則が振り子の動き方程式を構成されているかに基づいて。
- 数学的振り子の動きをモデル化する方程式は、どのような制約の下で得られます。
- どのような振動が高調波と呼ばれます。
- 振幅、位相および振動頻度の決定を与えます。